

Robot Locomotion
Hybrid Dynamic Systems and Robot Locomotion Lab at Virginia Tech
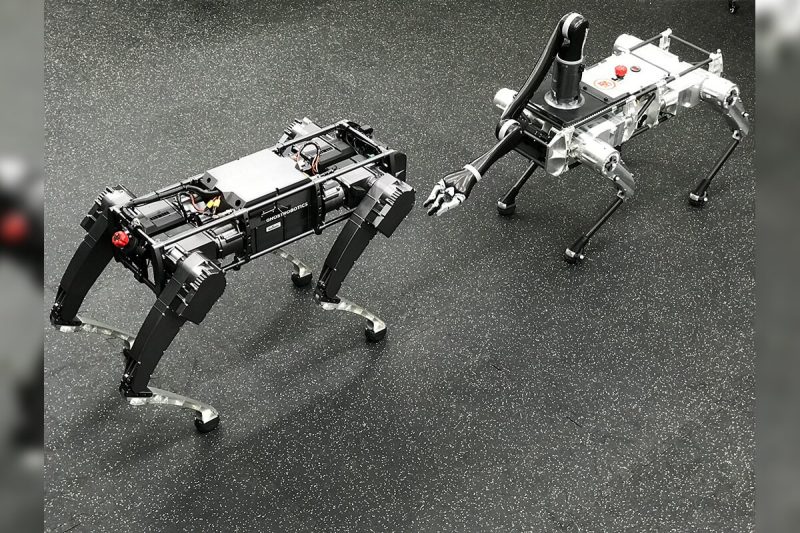
We are interested in understanding the principle of locomotion that underline the stability, agility, and dexterity of animals. We then develop mathematical algorithms and software to translate these principles into robot locomotion. An agile quadrupedal robot will demonstrate its capabilities such as forward walk, lateral walk, and push-ups.
More exhibits
-
General Item
-
General Item
-
General Item
-
General Item
-
General Item



Page 1 of 8 | 47 Results