

Flying Squirrels
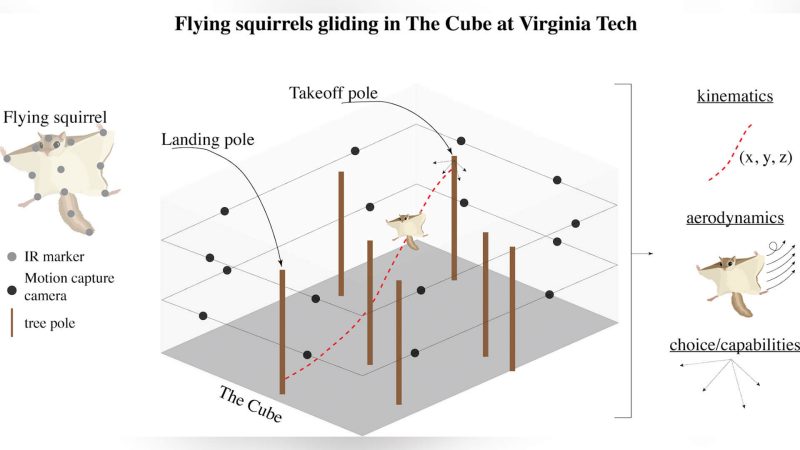
High above the forest floor, southern flying squirrels launch from tree trunks, stretch their skin “wings,” and carve graceful arcs through the night air. Yet scientists still don’t know exactly how these tiny mammals steer, brake, or accelerate while gliding. Using Virginia Tech’s Cube—a spacious motion-capture theater equipped with wall-to-wall projectors and high-speed cameras—our team will film every millimeter of a squirrel’s glide in three dimensions. By tracking changes in body posture, orientation, and tail position, we will quantify the forces that keep the squirrels aloft and the maneuvers that let them thread safely through dense canopies. What we learn will reveal the limits of their aerial performance, explain how habitat fragmentation affects their movements, and provide new guidelines for forest management and wildlife corridors. The project blends biomechanics, ecology, engineering, and the creative arts to illuminate the hidden athleticism of one of Appalachia’s most charismatic night-time gliders.